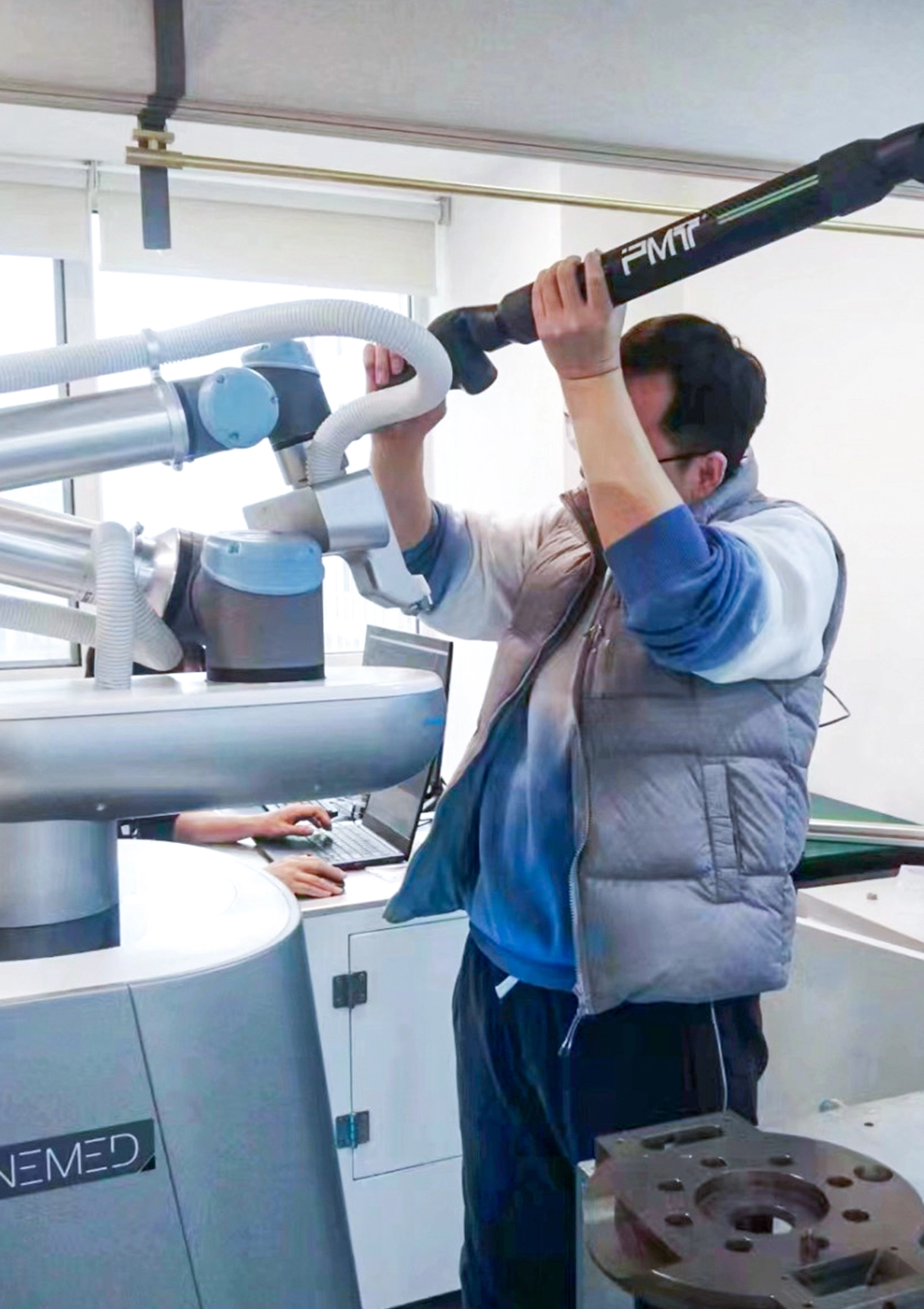
Im Bereich der Operationsroboter wird die Trajektorienerkennung h?ufig eingesetzt, um die Positionsgenauigkeit und Wiederholbarkeit der Roboter zu bewerten. Beispielsweise verwenden Forscher bei Anwendungen von Operationsrobotern, die auf Bildnavigation und -positionierung basieren, ein tragbares Koordinatenmessger?t, um die Position und Wiederholbarkeit des Roboters in verschiedenen Haltungen zu bewerten. Versuchsergebnisse haben gezeigt, dass diese Methode dazu beigetragen hat, die Positionsgenauigkeit von Operationsrobotern effektiv zu verbessern und die Erfolgsrate bei Operationen zu erh?hen.